|
Developer Documentation
|
|
Developer Documentation
|
Stores a single animation. More...
#include <ObjectTypes/Skeleton/Animation/AnimationT.hh>
Public Types | |
| typedef PointT | Point |
| typedef Point::value_type | Scalar |
| typedef PoseT< PointT > | Pose |
Public Member Functions | |
| AnimationT (std::string _name="") | |
| virtual AnimationT * | copy ()=0 |
| virtual void | updateFromGlobal (unsigned int _index)=0 |
| virtual void | clearPoseCache () |
| std::string | name () |
| void | setName (std::string _name) |
| int | fps () |
| void | setFps (int _fps) |
Frame access | |
There is one pose per frame. | |
| virtual Pose * | pose (unsigned int _iFrame)=0 |
| virtual unsigned int | frameCount ()=0 |
Synchronization | |
Use these methods to keep the poses in sync with the number (and indices) of the joints. | |
| virtual void | insertJointAt (unsigned int _index)=0 |
| virtual void | removeJointAt (unsigned int _index)=0 |
Protected Attributes | |
| std::string | name_ |
| int | fps_ |
Friends | |
| template<typename > | |
| class | SkeletonT |
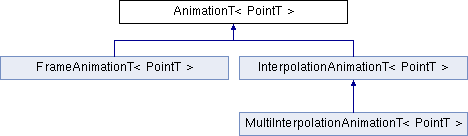
Stores a single animation.
This class is used by a skeleton to store a single animation. An animation is an array of different Poses. Both the reference pose and the skeleton hierarchy are not used by the animation class itself, but are passed to the poses.
Definition at line 67 of file AnimationT.hh.
 1.8.11
1.8.11 
