
A Lightweight Electrotactile Feedback Device to Improve Grasping in Immersive Virtual Environments
Proceedings of IEEE Virtual Reality Conference (2016)
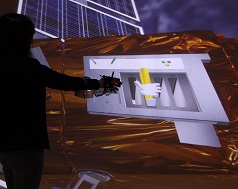
An immersive virtual environment is the ideal platform for the planning and training of on-orbit servicing missions. In such kind of virtual assembly simulation, grasping virtual objects is one of the most common and natural interactions. In this paper, we present a novel, small and lightweight electrotactile feedback device, specifically designed for immersive virtual environments. We conducted a study to assess the feasibility and usability of our interaction device. Results show that electrotactile feedback improved the user’s grasping in our virtual on-orbit servicing scenario. The task completion time was significantly lower and the precision of the user’s interaction was higher.
