
Improving Image-Based Localization by Active Correspondence Search
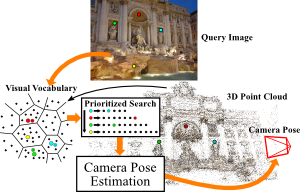
We propose a powerful pipeline for determining the pose of a query image relative to a point cloud reconstruction of a large scene consisting of more than one million 3D points. The key component of our approach is an efficient and effective search method to establish matches between image features and scene points needed for pose estimation. Our main contribution is a framework for actively searching for additional matches, based on both 2D-to-3D and 3D-to-2D search. A unified formulation of search in both directions allows us to exploit the distinct advantages of both strategies, while avoiding their weaknesses. Due to active search, the resulting pipeline is able to close the gap in registration performance observed between efficient search methods and approaches that are allowed to run for multiple seconds, without sacrificing run-time efficiency. Our method achieves the best registration performance published so far on three standard benchmark datasets, with run-times comparable or superior to the fastest state-of-the-art methods.
The original publication will be available at www.springerlink.com upon publication.
