
Fast and Robust QEF Minimization using Probabilistic Quadrics
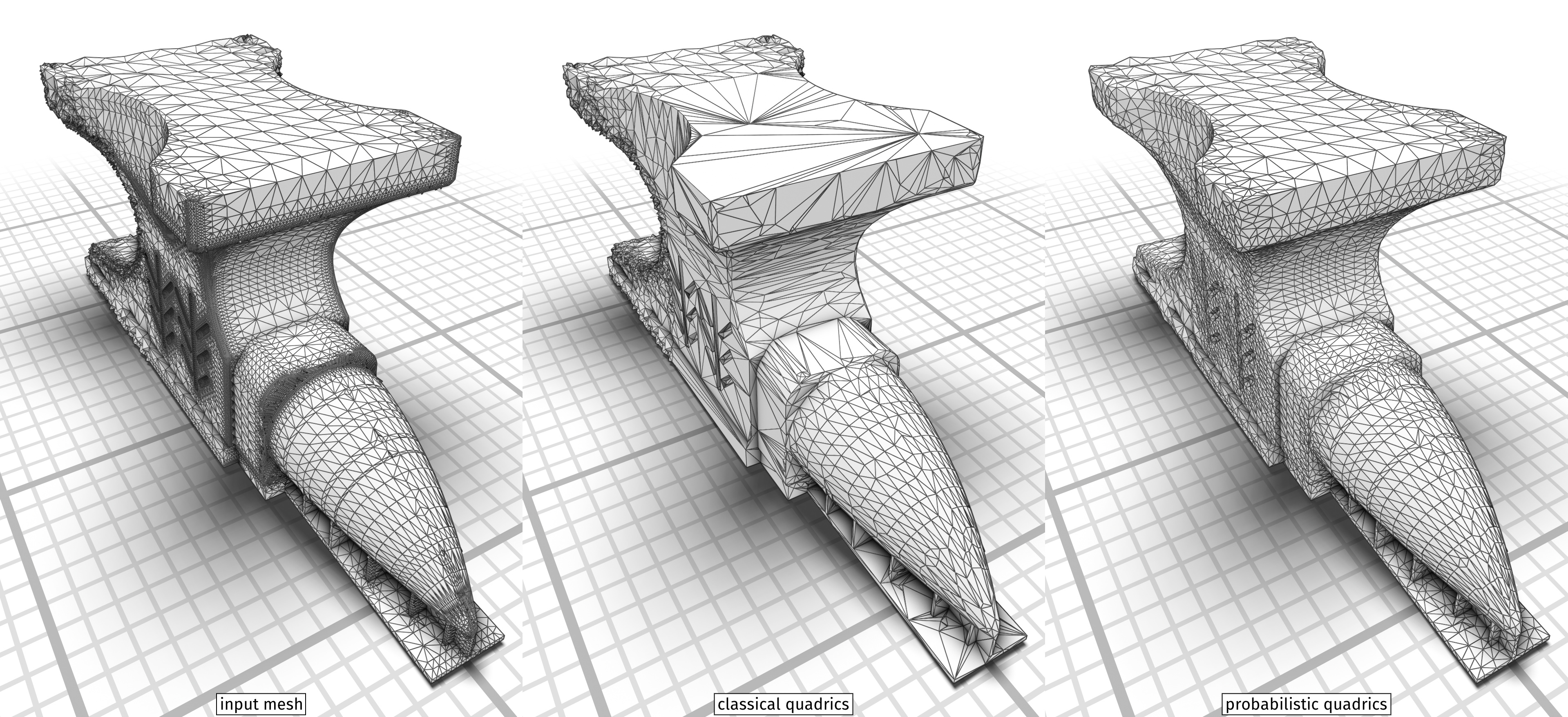
Error quadrics are a fundamental and powerful building block in many geometry processing algorithms. However, finding the minimizer of a given quadric is in many cases not robust and requires a singular value decomposition or some ad-hoc regularization. While classical error quadrics measure the squared deviation from a set of ground truth planes or polygons, we treat the input data as genuinely uncertain information and embed error quadrics in a probabilistic setting ("probabilistic quadrics") where the optimal point minimizes the expected squared error. We derive closed form solutions for the popular plane and triangle quadrics subject to (spatially varying, anisotropic) Gaussian noise. Probabilistic quadrics can be minimized robustly by solving a simple linear system - 50x faster than SVD. We show that probabilistic quadrics have superior properties in tasks like decimation and isosurface extraction since they favor more uniform triangulations and are more tolerant to noise while still maintaining feature sensitivity. A broad spectrum of applications can directly benefit from our new quadrics as a drop-in replacement which we demonstrate with mesh smoothing via filtered quadrics and non-linear subdivision surfaces.
@article {10.1111:cgf.13933,
journal = {Computer Graphics Forum},
title = {{Fast and Robust QEF Minimization using Probabilistic Quadrics}},
author = {Trettner, Philip and Kobbelt, Leif},
year = {2020},
publisher = {The Eurographics Association and John Wiley & Sons Ltd.},
ISSN = {1467-8659},
DOI = {10.1111/cgf.13933}
}
