
Surface Map Homology Inference
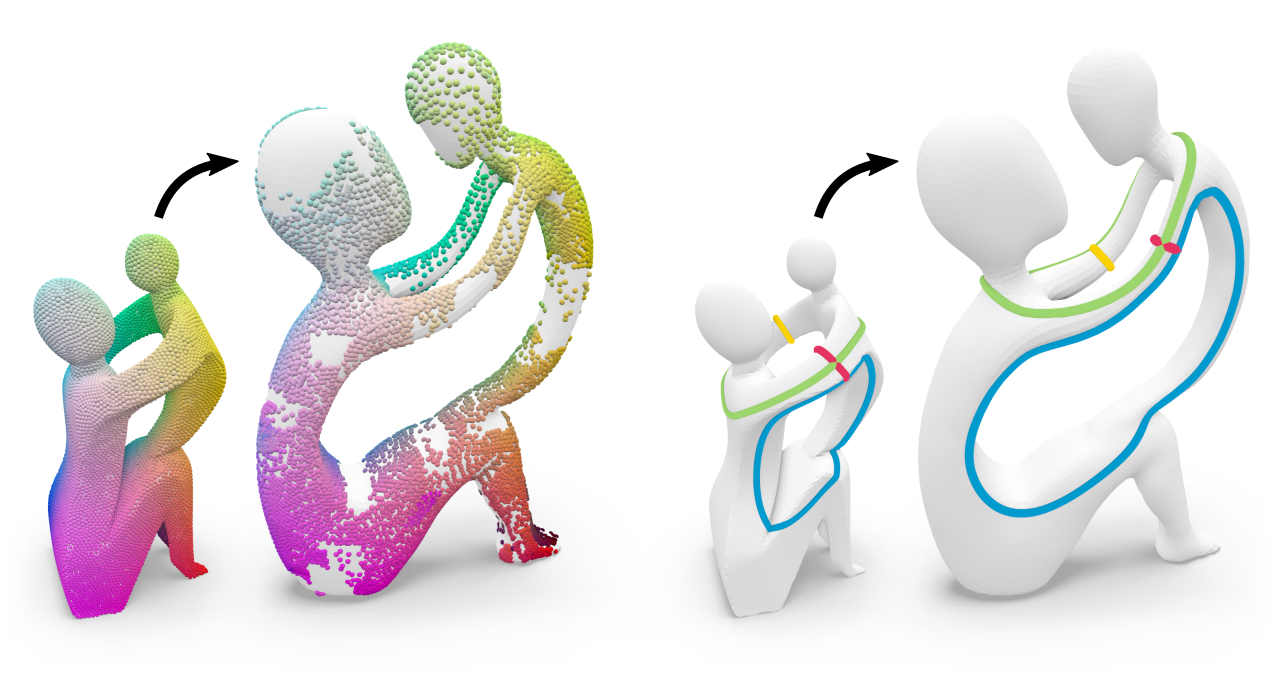
A homeomorphism between two surfaces not only defines a (continuous and bijective) geometric correspondence of points but also (by implication) an identification of topological features, i.e. handles and tunnels, and how the map twists around them. However, in practice, surface maps are often encoded via sparse correspondences or fuzzy representations that merely approximate a homeomorphism and are therefore inherently ambiguous about map topology. In this work, we show a way to infer topological information from an imperfect input map between two shapes. In particular, we compute a homology map, a linear map that transports homology classes of cycles from one surface to the other, subject to a global consistency constraint. Our inference robustly handles imperfect (e.g., partial, sparse, fuzzy, noisy, outlier-ridden, non-injective) input maps and is guaranteed to produce homology maps that are compatible with true homeomorphisms between the input shapes. Homology maps inferred by our method can be directly used to transfer homological information between shapes, or serve as foundation for the construction of a proper homeomorphism guided by the input map, e.g., via compatible surface decomposition.
- Best Paper Award at SGP 2021
- Graphics Replicability Stamp
@article{born2021surface,
title={Surface Map Homology Inference},
author={Born, Janis and Schmidt, Patrick and Campen, Marcel and Kobbelt, Leif},
year={2021},
journal={Computer Graphics Forum},
volume={40},
number={5},
}
