
LaserBrush: A Flexible Device for 3D Reconstruction of Indoor Scenes
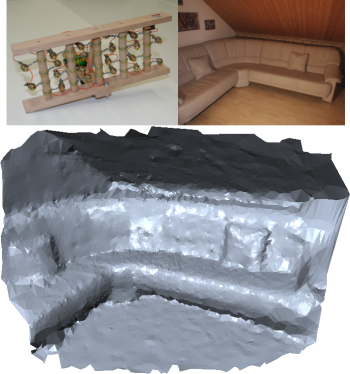
While many techniques for the 3D reconstruction of small to medium sized objects have been proposed in recent years, the reconstruction of entire scenes is still a challenging task. This is especially true for indoor environments where existing active reconstruction techniques are usually quite expensive and passive, image-based techniques tend to fail due to high scene complexities, difficult lighting situations, or shiny surface materials. To fill this gap we present a novel low-cost method for the reconstruction of depth maps using a video camera and an array of laser pointers mounted on a hand-held rig. Similar to existing laser-based active reconstruction techniques, our method is based on a fixed camera, moving laser rays and depth computation by triangulation. However, unlike traditional methods, the position and orientation of the laser rig does not need to be calibrated a-priori and no precise control is necessary during image capture. The user rather moves the laser rig freely through the scene in a brush-like manner, letting the laser points sweep over the scene's surface. We do not impose any constraints on the distribution of the laser rays, the motion of the laser rig, or the scene geometry except that in each frame at least six laser points have to be visible. Our main contributions are two-fold. The first is the depth map reconstruction technique based on irregularly oriented laser rays that, by exploiting robust sampling techniques, is able to cope with missing and even wrongly detected laser points. The second is a smoothing operator for the reconstructed geometry specifically tailored to our setting that removes most of the inevitable noise introduced by calibration and detection errors without damaging important surface features like sharp edges.
