
Profile

|
Publications
Character Reconstruction and Animation from Uncalibrated Video
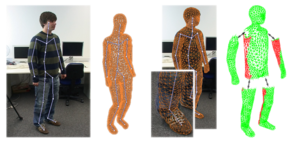
We present a novel method to reconstruct 3D character models from video. The main conceptual contribution is that the reconstruction can be performed from a single uncalibrated video sequence which shows the character in articulated motion. We reduce this generalized problem setting to the easier case of multi-view reconstruction of a rigid scene by applying pose synchronization of the character between frames. This is enabled by two central technical contributions. First, based on a generic character shape template, a new mesh-based technique for accurate shape tracking is proposed. This method successfully handles the complex occlusions issues, which occur when tracking the motion of an articulated character. Secondly, we show that image-based 3D reconstruction becomes possible by deforming the tracked character shapes as-rigid-as-possible into a common pose using motion capture data. After pose synchronization, several partial reconstructions can be merged in order to create a single, consistent 3D character model. We integrated these components into a simple interactive framework, which allows for straightforward generation and animation of 3D models for a variety of character shapes from uncalibrated monocular video.
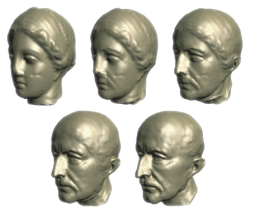
PriMo: Coupled Prisms for Intuitive Surface Modeling

We present a new method for 3D shape modeling that achieves intuitive and robust deformations by emulating physically plausible surface behavior inspired by thin shells and plates. The surface mesh is embedded in a layer of volumetric prisms, which are coupled through non-linear, elastic forces. To deform the mesh, prisms are rigidly transformed to satisfy user constraints while minimizing the elastic energy. The rigidity of the prisms prevents degenerations even under extreme deformations, making the method numerically stable. For the underlying geometric optimization we employ both local and global shape matching techniques. Our modeling framework allows for the specification of various geometrically intuitive parameters that provide control over the physical surface behavior. While computationally more involved than previous methods, our approach significantly improves robustness and simplifies user interaction for large, complex deformations.
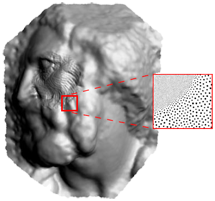
Point-Based Multiscale Surface Representation
In this article we present a new multiscale surface representation based on point samples. Given an unstructured point cloud as input, our method first computes a series of point-based surface approximations at successively higher levels of smoothness, that is, coarser scales of detail, using geometric low-pass filtering. These point clouds are then encoded relative to each other by expressing each level as a scalar displacement of its predecessor. Low-pass filtering and encoding are combined in an efficient multilevel projection operator using local weighted least squares fitting.
Our representation is motivated by the need for higher-level editing semantics which allow surface modifications at different scales. The user would be able to edit the surface at different approximation levels to perform coarse-scale edits on the whole model as well as very localized modifications on the surface detail. Additionally, the multiscale representation provides a separation in geometric scale which can be understood as a spectral decomposition of the surface geometry. Based on this observation, advanced geometric filtering methods can be implemented that mimic the effects of Fourier filters to achieve effects such as smoothing, enhancement, or band-bass filtering.
Shape Modeling with Point-Sampled Geometry
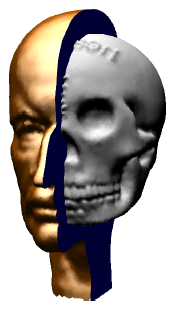
We present a versatile and complete free-form shape modeling framework for point-sampled geometry. By combining unstructured point clouds with the implicit surface definition of the moving least squares approximation, we obtain a hybrid geometry representation that allows us to exploit the advantages of implicit and parametric surface models. Based on this representation we introduce a shape modeling system that enables the designer to perform large constrained deformations as well as boolean operations on arbitrarily shaped objects. Due to minimum consistency requirements, point-sampled surfaces can easily be re-structured on the fly to support extreme geometric deformations during interactive editing. In addition, we show that strict topology control is possible and sharp features can be generated and preserved on point-sampled objects. We demonstrate the effectiveness of our system on a large set of input models, including noisy range scans, irregular point clouds, and sparsely as well as densely sampled models.
Efficient Simplification of Point-Sampled Surfaces
In this paper we introduce, analyze and quantitatively compare a number of surface simplification methods for point-sampled geometry. We have implemented incremental and hierarchical clustering, iterative simplification, and particle simulation algorithms to create approximations of point-based models with lower sampling density. All these methods work directly on the point cloud, requiring no intermediate tesselation. We show how local variation estimation and quadric error metrics can be employed to diminish the approximation error and concentrate more samples in regions of high curvature. To compare the quality of the simplified surfaces, we have designed a new method for computing numerical and visual error estimates for point-sampled surfaces. Our algorithms are fast, easy to implement, and create high-quality surface approximations, clearly demonstrating the effectiveness of point-based surface simplification.
