
Profile

|
Publications
Exact and Efficient Mesh-Kernel Generation
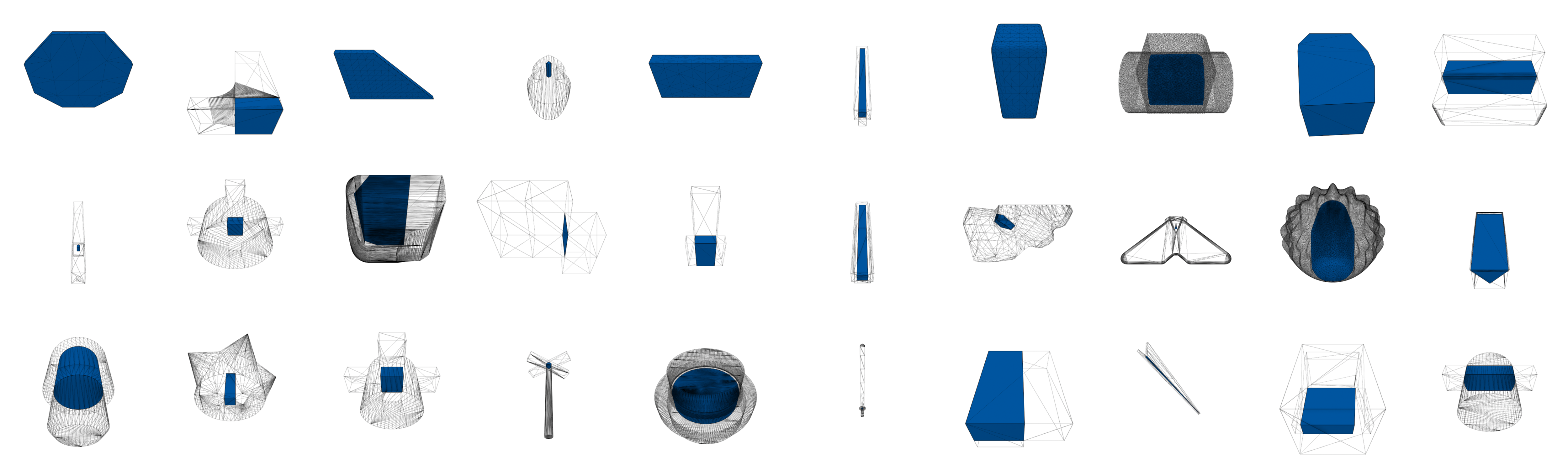
The mesh kernel for a star-shaped mesh is a convex polyhedron given by the intersection of all half-spaces defined by the faces of the input mesh. For all non-star-shaped meshes, the kernel is empty. We present a method to robustly and efficiently compute the kernel of an input triangle mesh by using exact plane-based integer arithmetic to compute the mesh kernel. We make use of several ways to accelerate the computation time. Since many applications just require information if a non-empty mesh kernel exists, we also propose a method to efficiently determine whether a kernel exists by developing an exact plane-based linear program solver. We evaluate our method on a large dataset of triangle meshes and show that in contrast to previous methods, our approach is exact and robust while maintaining a high performance. It is on average two orders of magnitude faster than other exact state-of-the-art methods and often about one order of magnitude faster than non-exact methods.
@article{nehring-wirxel2025mesh_kernel,
title={Exact and Efficient Mesh-Kernel Generation},
author={Nehring-Wirxel, Julius and Kern, Paul and Trettner, Philip and Kobbelt, Leif},
year={2025},
journal={Computer Graphics Forum},
volume={44},
number={5},
}
EMBER: Exact Mesh Booleans via Efficient & Robust Local Arrangements
Boolean operators are an essential tool in a wide range of geometry processing and CAD/CAM tasks. We present a novel method, EMBER, to compute Boolean operations on polygon meshes which is exact, reliable, and highly performant at the same time. Exactness is guaranteed by using a plane-based representation for the input meshes along with recently introduced homogeneous integer coordinates. Reliability and robustness emerge from a formulation of the algorithm via generalized winding numbers and mesh arrangements. High performance is achieved by avoiding the (pre-)construction of a global acceleration structure. Instead, our algorithm performs an adaptive recursive subdivision of the scene’s bounding box while generating and tracking all required data on the fly. By leveraging a number of early-out termination criteria, we can avoid the generation and inspection of regions that do not contribute to the output. With a careful implementation and a work-stealing multi-threading architecture, we are able to compute Boolean operations between meshes with millions of triangles at interactive rates. We run an extensive evaluation on the Thingi10K dataset to demonstrate that our method outperforms state-of-the-art algorithms, even inexact ones like QuickCSG, by orders of magnitude.
If you are interested in a binary implementation including various additional features, please contact the authors. Contact: trettner@shapedcode.com
Geodesic Distance Computation via Virtual Source Propagation
We present a highly practical, efficient, and versatile approach for computing approximate geodesic distances. The method is designed to operate on triangle meshes and a set of point sources on the surface. We also show extensions for all kinds of geometric input including inconsistent triangle soups and point clouds, as well as other source types, such as lines. The algorithm is based on the propagation of virtual sources and hence easy to implement. We extensively evaluate our method on about 10000 meshes taken from the Thingi10k and the Tet Meshing in the Wild data sets. Our approach clearly outperforms previous approximate methods in terms of runtime efficiency and accuracy. Through careful implementation and cache optimization, we achieve runtimes comparable to other elementary mesh operations (e.g. smoothing, curvature estimation) such that geodesic distances become a "first-class citizen" in the toolbox of geometric operations. Our method can be parallelized and we observe up to 6× speed-up on the CPU and 20× on the GPU. We present a number of mesh processing tasks easily implemented on the basis of fast geodesic distances. The source code of our method will be provided as a C++ library under the MIT license.
Note: we are currently in the process of cleaning up and documenting the source code. A basic implementation can already be found in the supplemental material.
Sampling from Quadric-Based CSG Surfaces
We present an efficient method to create samples directly on surfaces defined by constructive solid geometry (CSG) trees or graphs. The generated samples can be used for visualization or as an approximation to the actual surface with strong guarantees. We chose to use quadric surfaces as CSG primitives as they can model classical primitives such as planes, cubes, spheres, cylinders, and ellipsoids, but also certain saddle surfaces. More importantly, they are closed under affine transformations, a desirable property for a modeling system. We also propose a rendering method that performs local quadric ray-tracing and clipping to achieve pixel-perfect accuracy and hole-free rendering.
Compression and Rendering of Textured Point Clouds via Sparse Coding

Splat-based rendering techniques produce highly realistic renderings from 3D scan data without prior mesh generation. Mapping high-resolution photographs to the splat primitives enables detailed reproduction of surface appearance. However, in many cases these massive datasets do not fit into GPU memory. In this paper, we present a compression and rendering method that is designed for large textured point cloud datasets. Our goal is to achieve compression ratios that outperform generic texture compression algorithms, while still retaining the ability to efficiently render without prior decompression. To achieve this, we resample the input textures by projecting them onto the splats and create a fixed-size representation that can be approximated by a sparse dictionary coding scheme. Each splat has a variable number of codeword indices and associated weights, which define the final texture as a linear combination during rendering. For further reduction of the memory footprint, we compress geometric attributes by careful clustering and quantization of local neighborhoods. Our approach reduces the memory requirements of textured point clouds by one order of magnitude, while retaining the possibility to efficiently render the compressed data.
Highly accurate digital traffic recording as a basis for future mobility research: Methods and concepts of the research project HDV-Mess
The research project HDV-Mess aims at a currently missing, but very crucial component for addressing important challenges in the field of connected and automated driving on public roads. The goal is to record traffic events at various relevant locations with high accuracy and to collect real traffic data as a basis for the development and validation of current and future sensor technologies as well as automated driving functions. For this purpose, it is necessary to develop a concept for a mobile modular system of measuring stations for highly accurate traffic data acquisition, which enables a temporary installation of a sensor and communication infrastructure at different locations. Within this paper, we first discuss the project goals before we present our traffic detection concept using mobile modular intelligent transport systems stations (ITS-Ss). We then explain the approaches for data processing of sensor raw data to refined trajectories, data communication, and data validation.
@article{DBLP:journals/corr/abs-2106-04175,
author = {Laurent Kloeker and
Fabian Thomsen and
Lutz Eckstein and
Philip Trettner and
Tim Elsner and
Julius Nehring{-}Wirxel and
Kersten Schuster and
Leif Kobbelt and
Michael Hoesch},
title = {Highly accurate digital traffic recording as a basis for future mobility
research: Methods and concepts of the research project HDV-Mess},
journal = {CoRR},
volume = {abs/2106.04175},
year = {2021},
url = {https://arxiv.org/abs/2106.04175},
eprinttype = {arXiv},
eprint = {2106.04175},
timestamp = {Fri, 11 Jun 2021 11:04:16 +0200},
biburl = {https://dblp.org/rec/journals/corr/abs-2106-04175.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}
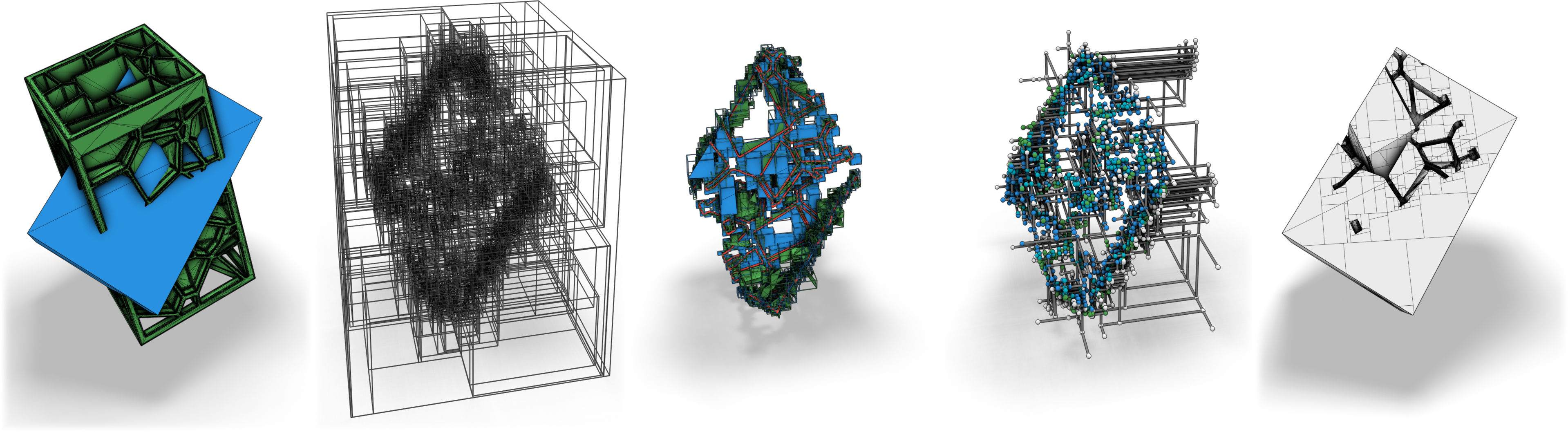
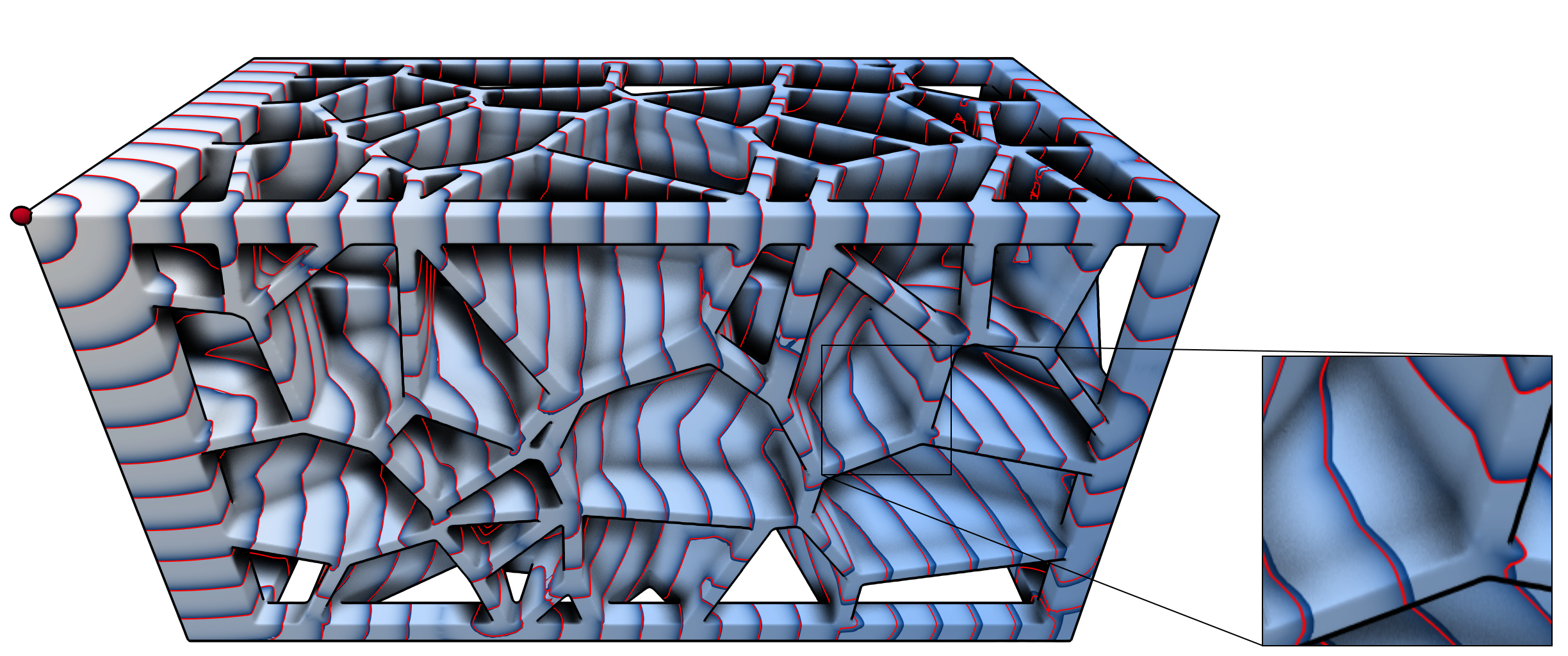
Fast Exact Booleans for Iterated CSG using Octree-Embedded BSPs
We present octree-embedded BSPs, a volumetric mesh data structure suited for performing a sequence of Boolean operations (iterated CSG) efficiently. At its core, our data structure leverages a plane-based geometry representation and integer arithmetics to guarantee unconditionally robust operations. These typically present considerable performance challenges which we overcome by using custom-tailored fixed-precision operations and an efficient algorithm for cutting a convex mesh against a plane. Consequently, BSP Booleans and mesh extraction are formulated in terms of mesh cutting. The octree is used as a global acceleration structure to keep modifications local and bound the BSP complexity. With our optimizations, we can perform up to 2.5 million mesh-plane cuts per second on a single core, which creates roughly 40-50 million output BSP nodes for CSG. We demonstrate our system in two iterated CSG settings: sweep volumes and a milling simulation.
@article{NEHRINGWIRXEL2021103015,
title = {Fast Exact Booleans for Iterated CSG using Octree-Embedded BSPs},
journal = {Computer-Aided Design},
volume = {135},
pages = {103015},
year = {2021},
issn = {0010-4485},
doi = {https://doi.org/10.1016/j.cad.2021.103015},
url = {https://www.sciencedirect.com/science/article/pii/S0010448521000269},
author = {Julius Nehring-Wirxel and Philip Trettner and Leif Kobbelt},
keywords = {Plane-based geometry, CSG, Mesh Booleans, BSP, Octree, Integer arithmetic},
abstract = {We present octree-embedded BSPs, a volumetric mesh data structure suited for performing a sequence of Boolean operations (iterated CSG) efficiently. At its core, our data structure leverages a plane-based geometry representation and integer arithmetics to guarantee unconditionally robust operations. These typically present considerable performance challenges which we overcome by using custom-tailored fixed-precision operations and an efficient algorithm for cutting a convex mesh against a plane. Consequently, BSP Booleans and mesh extraction are formulated in terms of mesh cutting. The octree is used as a global acceleration structure to keep modifications local and bound the BSP complexity. With our optimizations, we can perform up to 2.5 million mesh-plane cuts per second on a single core, which creates roughly 40-50 million output BSP nodes for CSG. We demonstrate our system in two iterated CSG settings: sweep volumes and a milling simulation.}
}
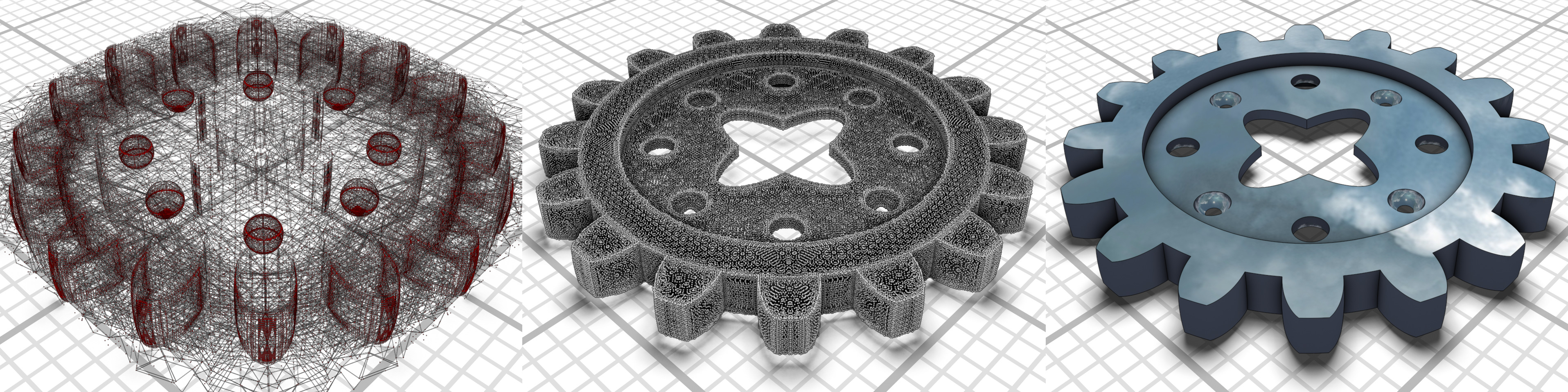
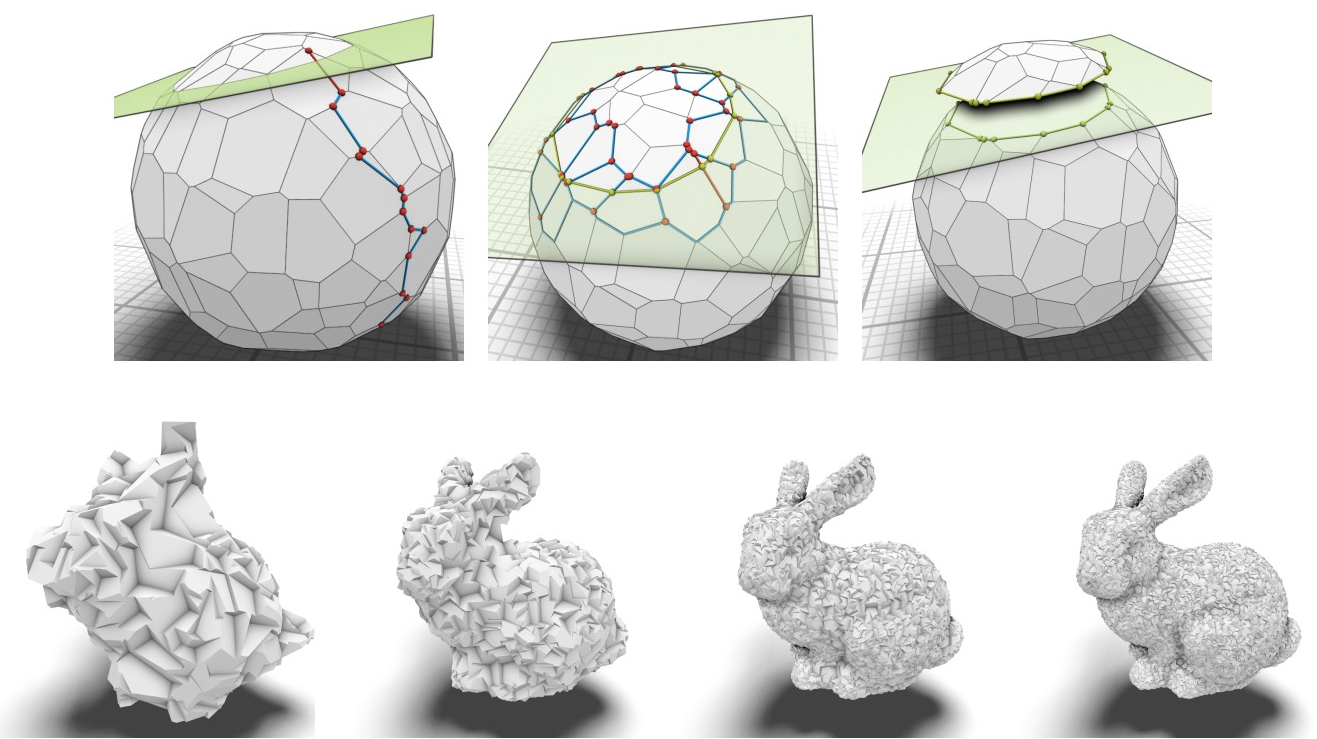
Fast and Robust QEF Minimization using Probabilistic Quadrics
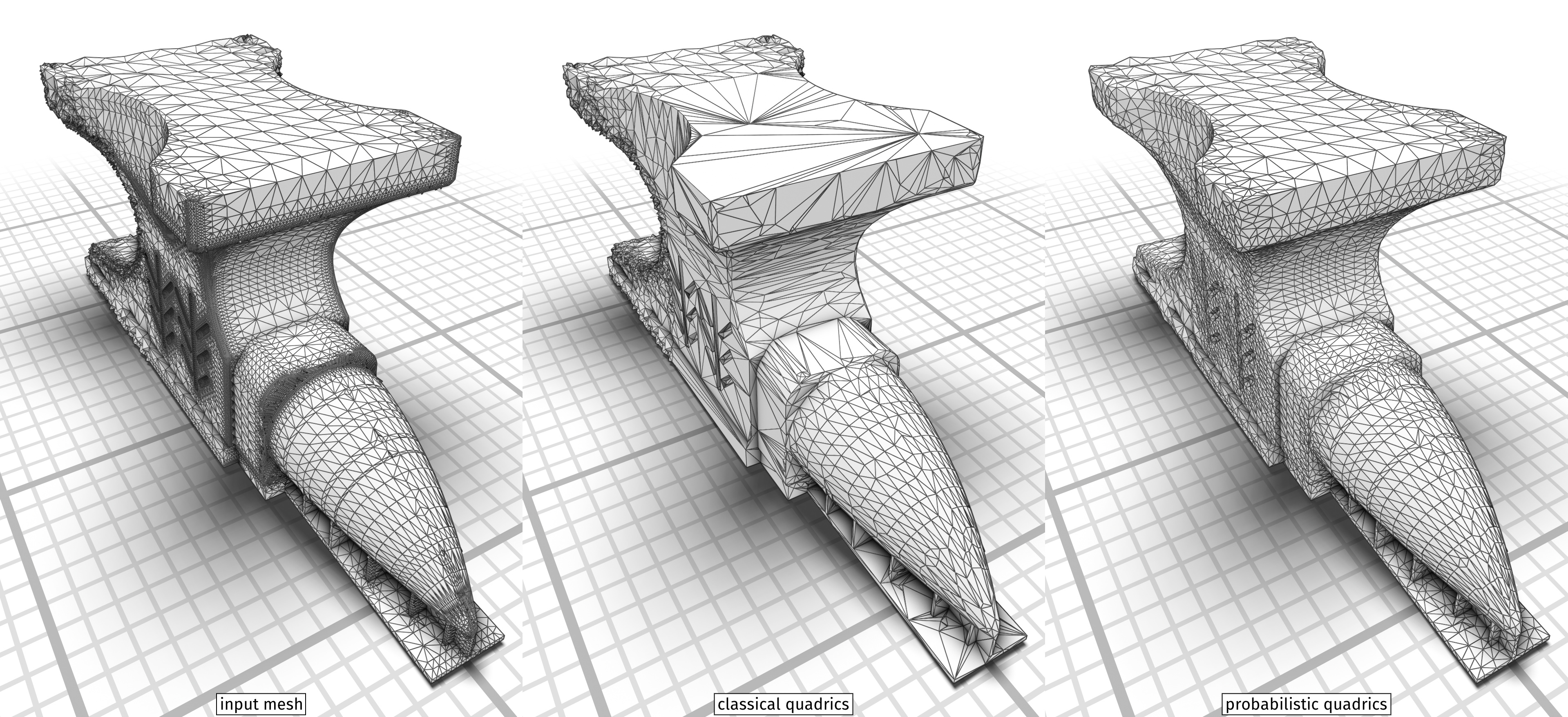
Error quadrics are a fundamental and powerful building block in many geometry processing algorithms. However, finding the minimizer of a given quadric is in many cases not robust and requires a singular value decomposition or some ad-hoc regularization. While classical error quadrics measure the squared deviation from a set of ground truth planes or polygons, we treat the input data as genuinely uncertain information and embed error quadrics in a probabilistic setting ("probabilistic quadrics") where the optimal point minimizes the expected squared error. We derive closed form solutions for the popular plane and triangle quadrics subject to (spatially varying, anisotropic) Gaussian noise. Probabilistic quadrics can be minimized robustly by solving a simple linear system - 50x faster than SVD. We show that probabilistic quadrics have superior properties in tasks like decimation and isosurface extraction since they favor more uniform triangulations and are more tolerant to noise while still maintaining feature sensitivity. A broad spectrum of applications can directly benefit from our new quadrics as a drop-in replacement which we demonstrate with mesh smoothing via filtered quadrics and non-linear subdivision surfaces.
@article {10.1111:cgf.13933,
journal = {Computer Graphics Forum},
title = {{Fast and Robust QEF Minimization using Probabilistic Quadrics}},
author = {Trettner, Philip and Kobbelt, Leif},
year = {2020},
publisher = {The Eurographics Association and John Wiley & Sons Ltd.},
ISSN = {1467-8659},
DOI = {10.1111/cgf.13933}
}
High-Performance Image Filters via Sparse Approximations
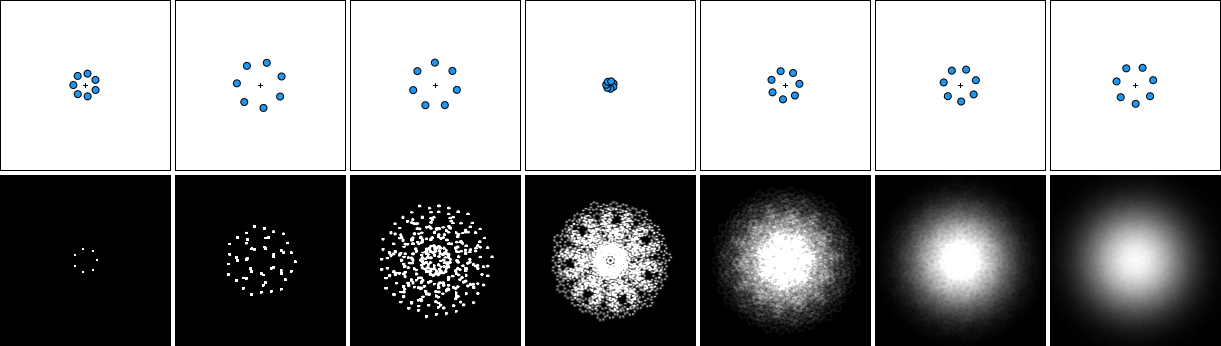
We present a numerical optimization method to find highly efficient (sparse) approximations for convolutional image filters. Using a modified parallel tempering approach, we solve a constrained optimization that maximizes approximation quality while strictly staying within a user-prescribed performance budget. The results are multi-pass filters where each pass computes a weighted sum of bilinearly interpolated sparse image samples, exploiting hardware acceleration on the GPU. We systematically decompose the target filter into a series of sparse convolutions, trying to find good trade-offs between approximation quality and performance. Since our sparse filters are linear and translation-invariant, they do not exhibit the aliasing and temporal coherence issues that often appear in filters working on image pyramids. We show several applications, ranging from simple Gaussian or box blurs to the emulation of sophisticated Bokeh effects with user-provided masks. Our filters achieve high performance as well as high quality, often providing significant speed-up at acceptable quality even for separable filters. The optimized filters can be baked into shaders and used as a drop-in replacement for filtering tasks in image processing or rendering pipelines.
A Three-Level Approach to Texture Mapping and Synthesis on 3D Surfaces

We present a method for example-based texturing of triangular 3D meshes. Our algorithm maps a small 2D texture sample onto objects of arbitrary size in a seamless fashion, with no visible repetitions and low overall distortion. It requires minimal user interaction and can be applied to complex, multi-layered input materials that are not required to be tileable. Our framework integrates a patch-based approach with per-pixel compositing. To minimize visual artifacts, we run a three-level optimization that starts with a rigid alignment of texture patches (macro scale), then continues with non-rigid adjustments (meso scale) and finally performs pixel-level texture blending (micro scale). We demonstrate that the relevance of the three levels depends on the texture content and type (stochastic, structured, or anisotropic textures).
@article{schuster2020,
author = {Schuster, Kersten and Trettner, Philip and Schmitz, Patric and Kobbelt, Leif},
title = {A Three-Level Approach to Texture Mapping and Synthesis on 3D Surfaces},
year = {2020},
issue_date = {Apr 2020},
publisher = {The Association for Computers in Mathematics and Science Teaching},
address = {USA},
volume = {3},
number = {1},
url = {https://doi.org/10.1145/3384542},
doi = {10.1145/3384542},
journal = {Proc. ACM Comput. Graph. Interact. Tech.},
month = apr,
articleno = {1},
numpages = {19},
keywords = {material blending, surface texture synthesis, texture mapping}
}
City Reconstruction and Visualization from Public Data Sources

We present a city reconstruction and visualization framework that integrates geometric models reconstructed with a range of different techniques. The framework generates the vast majority of buildings procedurally, which yields plausible visualizations for structurally simple buildings, e.g. residential buildings. For structurally complex landmarks, e.g. churches, a procedural approach does not achieve satisfactory visual fidelity. Thus, we also employ image-based techniques to reconstruct the latter in a more realistic, recognizable way. As the manual acquisition of data required for the procedural and image-based reconstructions is practically infeasible for whole cities, we rely on publicly available data as well as crowd sourcing projects. This enables our framework to render views from cities without any dedicated data acquisition as long as there are sufficient public data sources available. To obtain a more lively impression of a city, we also visualize dynamic features like weather conditions and traffic based on publicly available real-time data.
